
မောင်းသူမဲ့ကားမောင်းစက်မှုလုပ်ငန်းအင်စတီကျု၏ မဟာဗျူဟာအသစ်၏စာရင်းဇယားများအရ၊ အရေးကြီးသောဘဏ္ဍာရေးဆိုင်ရာဖြစ်ရပ် ၂၀၀ ကျော်ကို ပြည်တွင်းပြည်ပတွင် 2021 ခုနှစ်တွင် ထုတ်ဖော်ပြသခဲ့ပြီး စုစုပေါင်းဘဏ္ဍာငွေပမာဏ ယွမ် 150 ဘီလီယံနီးပါး (IPO အပါအဝင်) ဖြင့် 2021 ခုနှစ်အတွင်း ပြည်တွင်းပြည်ပတွင် ထုတ်ဖော်ပြသခဲ့သည်။ အတွင်းတွင်၊ ငွေရေးကြေးရေးပွဲ ၇၀ နီးပါးနှင့် ယွမ်ငွေ ဘီလီယံ ၃၀ ကျော်ကို မြန်နှုန်းနိမ့် မောင်းသူမဲ့ ထုတ်ကုန်နှင့် ဖြေရှင်းချက်ပေးသူများမှ စုဆောင်းခဲ့သည်။
လွန်ခဲ့သည့် နှစ်နှစ်အတွင်း၊ မောင်းသူမဲ့ ပို့ဆောင်မှု၊ မောင်းသူမဲ့ သန့်ရှင်းရေးနှင့် မောင်းသူမဲ့ သိုလှောင်မှု ဆင်းသက်မှု အခြေအနေများ ပေါ်ပေါက်လာခဲ့ပြီး အရင်းအနှီး အားကောင်းလာမှုကြောင့် မောင်းသူမဲ့ ယာဉ်များကို ဖွံ့ဖြိုးတိုးတက်မှု၏ “အမြန်လမ်းကြား” သို့ တွန်းပို့ခဲ့သည်။ Multi-mode အာရုံခံပေါင်းစပ်နည်းပညာကို ဖွံ့ဖြိုးတိုးတက်မှုနှင့်အတူ၊ ရှေ့ဆောင်ကိုယ်စားလှယ်များသည် လမ်းသန့်ရှင်းရေး၊ စာတင်ခြင်းနှင့် အမြန်ပို့ဆောင်ခြင်း၊ ပို့ဆောင်ပေးခြင်းစသည့် အလုပ်များကို လုပ်ဆောင်ပေးသည့် “ပရော်ဖက်ရှင်နယ်” အဖွဲ့ထဲသို့ ဝင်ရောက်လာကြသည်။

မောင်းသူမဲ့ ယာဉ်များ သန့်ရှင်းရေး ဆောင်ရွက်နေကြောင်း သိရသည်။
လူအင်အားကို အစားထိုးသည့် “အနာဂတ်အသက်မွေးဝမ်းကျောင်းယာဉ်” အနေဖြင့်၊ ထွန်းသစ်စစက်မှုလုပ်ငန်းတွင် အနိုင်ရရန်အတွက် ကျင့်သုံးသည့် အတားအဆီးများကို ရှောင်ရှားရန် ဖြေရှင်းနည်းများသည် ညစ်ညမ်းမှုမရှိစေဘဲ၊ လုပ်ငန်းခွင်အတွင်း မောင်းသူမဲ့ယာဉ်ကဲ့သို့သော လုပ်ငန်းခွင်အခြေအနေအရ ယာဉ်အား စွမ်းအားမြှင့်ပေးရမည်ဖြစ်သည်။ စတော့ရှယ်ယာ ခွဲခြားသတ်မှတ်ခြင်းဆိုင်ရာ လုပ်ဆောင်ချက် ရှိသင့်သည်။ ပို့ဆောင်ခြင်းလုပ်ငန်းတွင် ဘေးကင်းသော အတားအဆီးများကို ရှောင်ရှားခြင်း၏ လုပ်ဆောင်ချက်နှင့်အတူ၊ သိုလှောင်မှုလုပ်ငန်းတွင် အရေးပေါ်အန္တရာယ်ကို ရှောင်ရှားနိုင်သည့် လုပ်ဆောင်ချက်နှင့်အတူ ……
- သန့်ရှင်းရေးလုပ်ငန်း- အသိဉာဏ်အာရုံခံခြင်း၏ သုံးပါးတစ်ဆူဓာတုဗေဒ

သန့်ရှင်းရေးလုပ်ငန်း- ဉာဏ်ရည်ဉာဏ်သွေး အာရုံခံစနစ်သုံးပါးတစ်ဆူကို တင်ပြထားသည်။
Beijing ဆောင်းရာသီအိုလံပစ်၏ “သန့်ရှင်း” Candela Sunshine စက်ရုပ်သည် ultrasonic ရေဒါ 19 ခု တပ်ဆင်ထားသော ဉာဏ်ရည်ထက်မြက်သော အာရုံခံစနစ်သုံးပါးစုံကို အသုံးပြုထားပြီး စက်ရုပ်အား ဘက်စုံအတားအဆီးများကို ရှောင်ရှားနိုင်ခြင်း၊ လျှံထွက်ခြင်းမှ တားဆီးခြင်းနှင့် အမှိုက်ပစ်ခြင်းဆိုင်ရာ လုပ်ဆောင်ချက်များကို အသုံးပြုထားသည်။
Aဝိုင်းအတားအဆီး ရှောင်ရှားခြင်း။
ကျောဘက်တွင် အတားအဆီးများကို စောင့်ကြည့်ခြင်းနှင့် သတိပေးခြင်းအတွက် နောက်ပြန်လှည့်ရန် ultrasonic ရေဒါ 2 လုံး၊ ရှေ့အောက်ရှိ ultrasonic ရေဒါ 3 ခုနှင့် ဘေးဘက်တွင် အလျားလိုက်၊ ဒေါင်လိုက်နှင့် ထောင့်စွန်းများ ဘက်စုံတိုးတက်မှုနှင့် အတားအဆီးကို ရှောင်ရှားရန် လုပ်ဆောင်ချက်များအတွက် ultrasonic ရေဒါ 6 ခု တပ်ဆင်ထားပါသည်။
လျှံထွက်ခြင်းကို ကာကွယ်ခြင်း။
ယာဉ်၏ loading area ၏ထိပ်တွင် အာရုံခံကိရိယာတစ်ခုကို တပ်ဆင်ပြီး အခြေအနေစောင့်ကြည့်ခြင်း၏ လုပ်ဆောင်ချက်ကို သိရှိရန်နှင့် သယ်ဆောင်နိုင်သည့်စွမ်းရည်သည် ဘေးကင်းရေးစံနှုန်းများနှင့် ကိုက်ညီကြောင်း သေချာစေရန်။
မြှပ်နှံမှု တိုက်ဖျက်ရေး
တင်ဆောင်ခြင်းမရှိသော သို့မဟုတ် မတင်ဆောင်ထားသည့်အခြေအနေတွင် ပြင်ပအင်အားစုများကြောင့် ခွဲထွက်သည့်အပိုင်းကို အများပြည်သူဘေးကင်းရေးကို အန္တရာယ်ဖြစ်စေသည်။
- ပို့ဆောင်ခြင်းလုပ်ငန်းကျယ်ကျယ်ပြန့်ပြန့်အသိဉာဏ် အတားအဆီး ရှောင်ရှားခြင်း ၎ဓာတုဗေဒ
ပို့ဆောင်ခြင်းလုပ်ငန်း - ပြီးပြည့်စုံသော အသိဉာဏ်ရှိသော အတားအဆီးကို ရှောင်ရှားခြင်း အစီအစဉ်၏ တစ်စိတ်တစ်ပိုင်း သရုပ်ပြခြင်း
ခရီးဝေး သယ်ယူပို့ဆောင်ရေးနှင့် နှိုင်းယှဉ်ပါက ပို့ဆောင်ရေးလုပ်ငန်း၏ အဓိကအချက်မှာ ခရီးတိုနှင့် ကြိမ်နှုန်းမြင့်ခြင်းတွင် တည်ရှိပြီး ဆိုလိုသည်မှာ မောင်းသူမဲ့ ပို့ဆောင်ရေးယာဉ်များသည် အဆောက်အအုံ ပြေးဆွဲခြင်းကဲ့သို့သော ရှုပ်ထွေးသော မြို့ပြအခြေအနေများကို ရင်ဆိုင်ရန်အတွက် ပိုမိုပြောင်းလွယ်ပြင်လွယ်နှင့် အန္တရာယ်ကင်းစေရန် ဒီဇိုင်းထုတ်ရမည်ဖြစ်ပါသည်။ လမ်းကြားများတွင် အတားအဆီးများကို ရှောင်ရှားခြင်း။ DYP သည် Zhixing Technology အား ကျယ်ကျယ်ပြန့်ပြန့် အသိဉာဏ်ရှိသော အတားအဆီး ရှောင်ရှားခြင်း အစီအစဉ်ကို ပံ့ပိုးပေးထားပြီး ၎င်း၏ ထုတ်ကုန်ကို တရုတ်နိုင်ငံရှိ ပွင့်လင်းသော ပတ်ဝန်းကျင်တွင် စမ်းသပ်ရန် မောင်းသူမဲ့ ပို့ဆောင်ရေးယာဉ် ဖြစ်လာစေသည်။
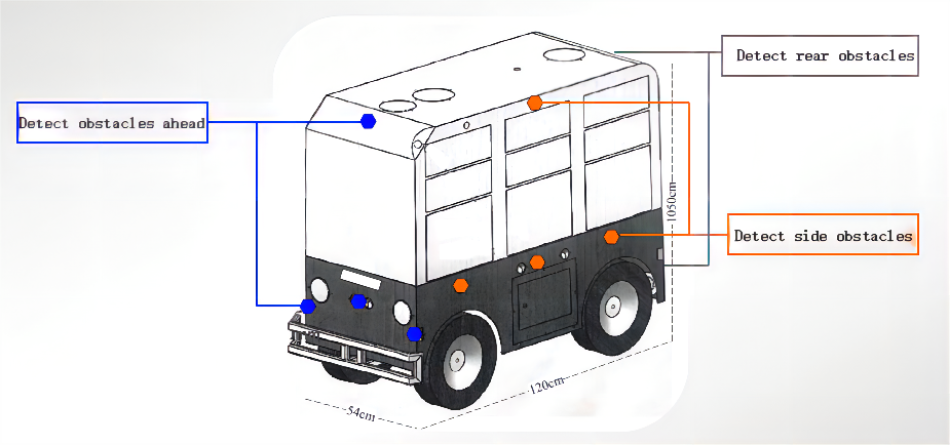
ရှေ့နှင့်နောက် အတားအဆီးများကို ရှောင်ပါ။
အမြင့်ကန့်သတ်ရေးတိုင်များကဲ့သို့သော ပိုမိုမြင့်မားသောအတားအဆီးများကိုရှာဖွေရန်အတွက် အရှေ့နှင့်အနောက်တွင် ultrasonic ရေဒါတစ်လုံးကို တပ်ဆင်ထားသည်။ ကန့်သတ်ဝင်ရိုးစွန်းများကဲ့သို့သော အနိမ့်ပိုင်းနှင့် ရှေ့ဘက်ခြမ်းအတားအဆီးများကို ထောက်လှမ်းနိုင်စေရန်အတွက် ultrasonic ရေဒါသုံးလုံးကို အရှေ့နှင့်အနောက်အောက်ခြေတွင် တပ်ဆင်ထားသည်။ တစ်ချိန်တည်းမှာပင်၊ ရှေ့နှင့်နောက်စွန်းများရှိ ultrasonic ရေဒါများသည် မောင်းသူမဲ့ယာဉ်ကို နောက်ပြန်လှည့်ရန် သို့မဟုတ် လှည့်ခြင်းအတွက် လုံခြုံစေနိုင်သည်။
ဘေးတိုက်အတားအဆီးများကို ရှောင်ရှားခြင်း။
မြင့်မားသောဘေးထွက်အတားအဆီးများကိုထောက်လှမ်းရန်နှင့် အမြန်ပို့ဆောင်ခြင်းလုပ်ငန်းကို အသက်ဝင်စေရန်အတွက် တစ်ဖက်စီတွင် ultrasonic ရေဒါတစ်ခု တပ်ဆင်ထားသည်။ လမ်းအစွန်းများ၊ အစိမ်းရောင်ခါးပတ်များနှင့် ရပ်နေသည့်တိုင်များကဲ့သို့သော အနိမ့်ဘက်အတားအဆီးများကို ရှာဖွေရန် ultrasonic ရေဒါသုံးလုံးကို တစ်ဖက်စီအောက်တွင် တပ်ဆင်ထားသည်။ ထို့အပြင်၊ ဘယ်နှင့်ညာရှိ ultrasonic ရေဒါများသည် မောင်းသူမဲ့ယာဉ်အတွက် ညာဘက် “ကားပါကင်နေရာ” ကို ရှာတွေ့နိုင်ပြီး အလိုအလျောက် ရပ်နားခြင်းကို အောင်မြင်စွာ ပြီးမြောက်စေနိုင်သည်။
- သိုလှောင်မှုလုပ်ငန်း- အရေးပေါ် ရှောင်ရှားခြင်းနှင့် လမ်းကြောင်း အကောင်းဆုံးzation sဓာတုဗေဒ

AGV အတားအဆီး ရှောင်ရှားမှု ပုံကြမ်း
အများအားဖြင့် ဂိုဒေါင်တွင် မောင်းသူမဲ့ယာဉ်များကို အနီအောက်ရောင်ခြည်နှင့် လေဆာနည်းပညာဖြေရှင်းချက်များဖြင့် ဒေသဆိုင်ရာလမ်းကြောင်းများစီစဉ်ခြင်းအတွက် နေရာချထားသော်လည်း ၎င်းတို့နှစ်ဦးစလုံးသည် တိကျမှုအရ အလင်းရောင်ကြောင့် ထိခိုက်နိုင်ပြီး ဂိုဒေါင်တစ်ခုအတွင်း တွန်းလှည်းအများအပြား လမ်းဖြတ်ကူးသည့်အခါ ယာဉ်တိုက်မှုအန္တရာယ်များ ဖြစ်ပေါ်လာနိုင်သည်။ Dianyingpu သည် ဂိုဒေါင်ရှိ AGV တွင် ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရအတားအဆီးကိုရှောင်ရှားရန်၊ အကြပ်အတည်းကာလတွင် အချိန်မီနှင့် တိကျစွာရပ်နားရန် ဂိုဒေါင်တွင် AGV ရေဒါကိုအသုံးပြု၍ အလင်းဒဏ်မခံရသော ဂိုဒေါင်စက်မှုလုပ်ငန်းအတွက် အရေးပေါ်အန္တရာယ်ရှောင်ရှားခြင်းနှင့် လမ်းကြောင်းကောင်းမွန်အောင်ပြုလုပ်ခြင်းဆိုင်ရာ ဖြေရှင်းချက်များကို ပေးပါသည်။
အရေးပေါ်ရှောင်ရှားခြင်း။
ultrasonic ရေဒါသည် အတားအဆီးတစ်ခုသတိပေးသည့်နေရာသို့ ဝင်ရောက်လာသောအခါ၊ အာရုံခံကိရိယာသည် အနီးဆုံးအတားအဆီး၏ လမ်းညွှန်အချက်အလက်များကို AGV ထိန်းချုပ်မှုစနစ်သို့ အချိန်မီ ပို့ဆောင်ပေးမည်ဖြစ်ပြီး ထိန်းချုပ်မှုစနစ်သည် တွန်းလှည်းကို နှေးကွေးစေရန်နှင့် ဘရိတ်ထိန်းပေးမည်ဖြစ်သည်။ တွန်းလှည်း၏ ရှေ့ဧရိယာတွင် မရှိသော အတားအဆီးများအတွက်၊ ၎င်းတို့သည် နီးကပ်နေသော်လည်း၊ တွန်းလှည်း၏ ထိရောက်မှုကို သေချာစေရန် ရေဒါမှ သတိပေးမည်မဟုတ်ပါ။
အကောင်းဆုံးလမ်းကြောင်းzလုပ်ဆောင်ချက်
မောင်းသူမဲ့ယာဉ်သည် ဒေသတွင်းလမ်းကြောင်းများစီစဉ်ခြင်းအတွက် တိကျသေချာသောမြေပုံဖြင့် ပေါင်းစပ်ထားသော လေဆာပွိုင့်တိမ်များကို အသုံးပြုကာ ရွေးချယ်ရမည့်လမ်းကြောင်းများစွာကို ရယူပါ။ ထို့နောက် အာထရာဆောင်းမှရရှိသော အတားအဆီးအချက်အလက်များကို ယာဉ်သြဒိနိတ်စနစ်သို့ နောက်ပြန်တွက်ချက်ကာ၊ ရွေးချယ်ရမည့်လမ်းကြောင်းများကို ထပ်မံစီစစ်ပြီး ပြုပြင်ကာ နောက်ဆုံးတွင် အကောင်းဆုံးသောလမ်းကြောင်းကို ဆင်းသက်လာပြီး ရှေ့သို့ရွေ့လျားမှုသည် ဤလမ်းကြောင်းပေါ်တွင် အခြေခံသည်။

- အကွာအဝေး 5m အထိ၊မျက်စိကွယ်သောနေရာသည် ၃ စင်တီမီတာအထိနိမ့်သည်။
- တည်ငြိမ်သော၊ အလင်းရောင်နှင့်မထိခိုက်ပါ။တိုင်းတာသောအရောင် အရာဝတ္ထု
- မြင့်မားသောယုံကြည်စိတ်ချရမှုတွေ့ဆုံပါ။ယာဉ်တန်းလိုအပ်ချက်များ
စာတိုက်အချိန်- သြဂုတ်-၃၀-၂၀၂၂